python教程
无穷级数
1024
centos
跳槽
NAND
javaweb
codeforces
题解
前后端分离项目
web前端
Java并发
off heap
sharding5.0.0
分支优化
BP神经网络
线程
PLC远程上下载
Java培训
AndroidMainfest
kitti
2024/4/19 16:14:27
【Mini KITTI】KITTI数据集简介 — Mini KITTI
KITTI数据集是三维点云算法常用的数据集之一,网络上有大量介绍资料,这里再不进行赘述。 为了快速进行算法调试、训练、评估和验证,以及快速下载,我制作了一个mini kitti数据集,数据集的文件目录结构与完整KITTI数据集保…
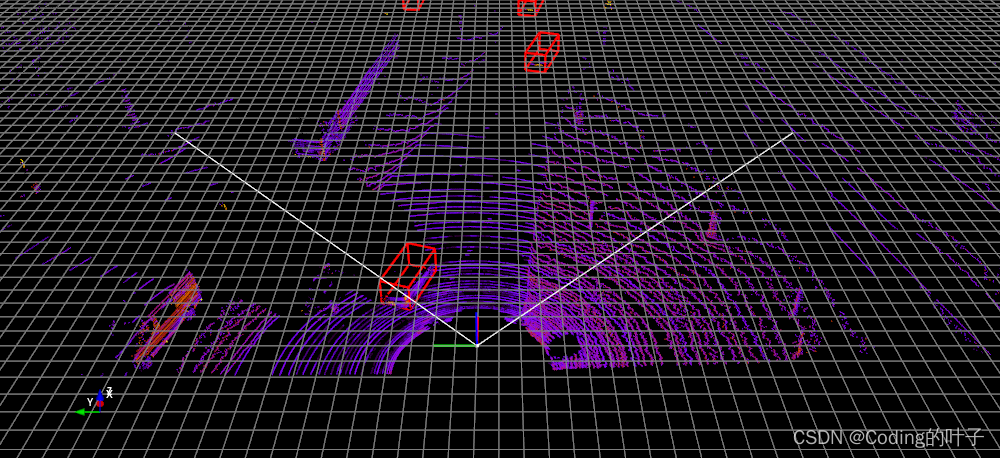
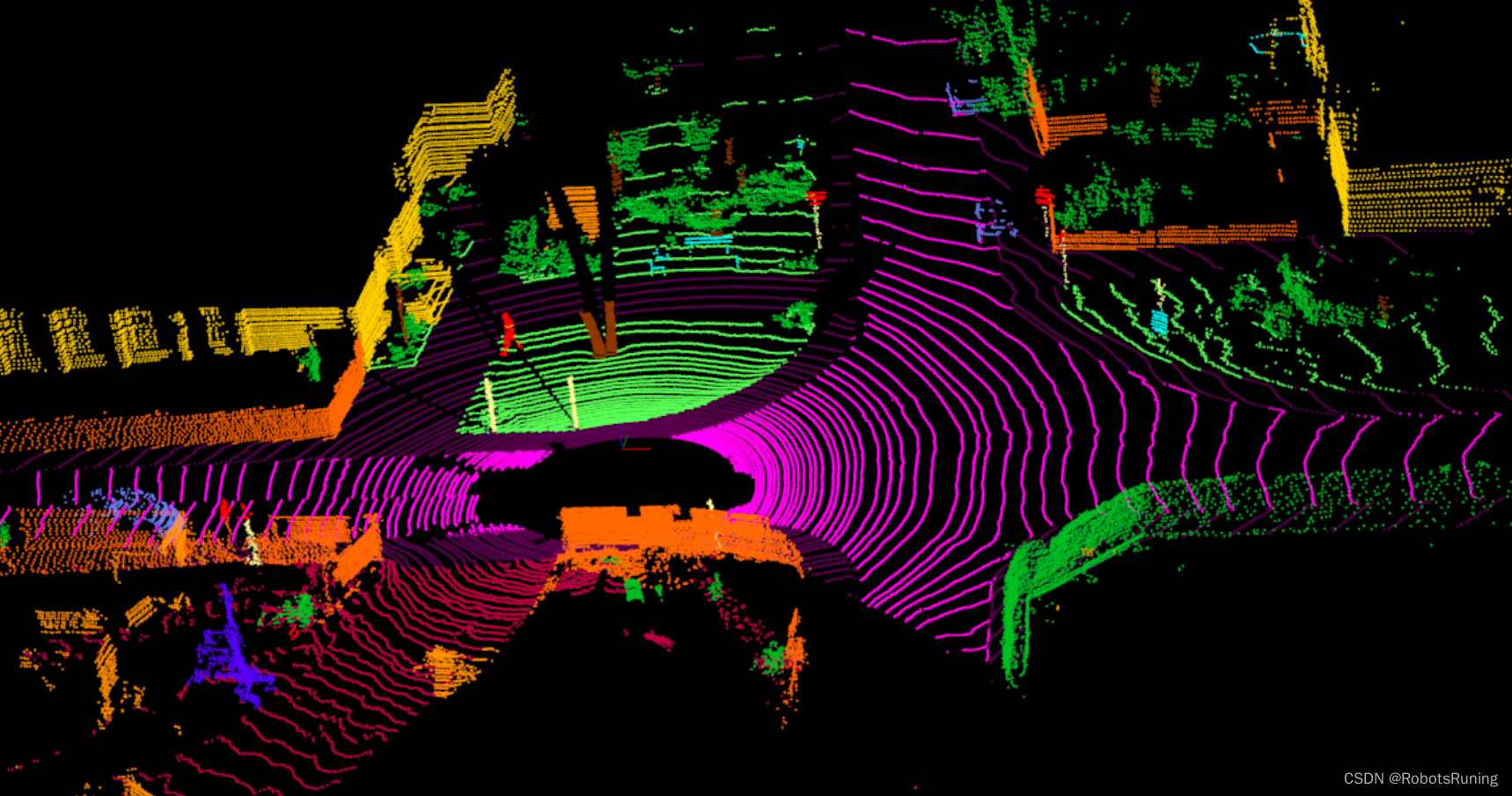
【三维目标检测可视化】三维点云目标检测与图像融合可视化
本节主要介绍将三维点云检测到的目标框投影到图像中进行可视化,含算法步骤、数据、代码以及可视化效果。 为了更好地展示可视化效果,需要把点云中图像范围的点云滤除掉,详细过程请参考:三维点云目标检测 — VoxelNet详解crop.py &…
【三维目标检测】VoxelNet(二):数据处理
本节主要介绍VoxelNet的数据处理部分,数据下载及预处理部分请参考:三维点云目标检测 — VoxelNet详解crop.py (一)_Coding的叶子的博客-CSDN博客。 其他三维目标检测算法的数据处理,特别是基于KITTI的三维目标检测&…
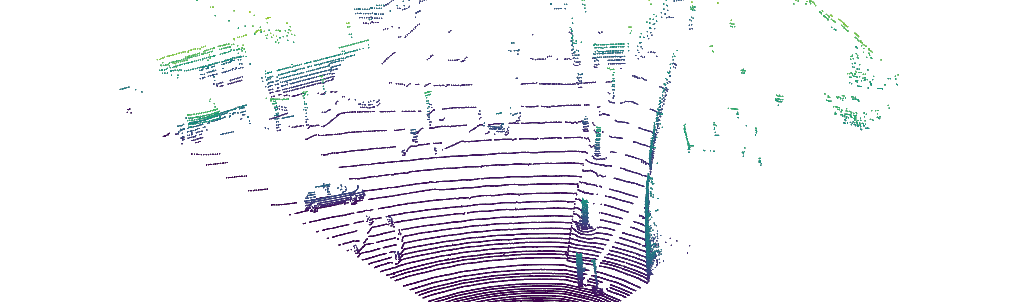
【KITTI】KITTI数据集简介(一) — 激光雷达数据
KITTI数据集的详细介绍网络上已经有较多资料,这里就不详细介绍。这里主要介绍接下来三维点云深度学习模型可能用到的数据文件。
1 KITTI 激光雷达数据存储结构 KITTI数据集包含多个文件夹,这里将介绍激光雷达数据,即data_object_velodyne。其…
3D目标检测跟踪 | 基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化
项目应用场景 面向自动驾驶场景的 3D 目标检测目标跟踪,基于kittiwaymo数据集的自动驾驶场景的3D目标检测跟踪渲染可视化查看。
项目效果 项目细节 > 具体参见项目 README.md (1) Kitti detection 数据集结构
# For Kitti Detection Dataset
└── k…
【KITTI】KITTI数据集简介(三) — 图像数据image_2
KITTI数据集种共包含了4相机数据,2个灰度相机和2个彩色相机,其中image_2存储了左侧彩色相机采集的RGB图像数据(RGB)。其他图像数据本次暂时不介绍,后续算法研究如果用到再进行补充。 相机坐标系中,y方向是高…

处理点云数据(五):坐标系的转换
相机的内外参矩阵
坐标系
主要有两类坐标系,一类为相机坐标系,一类为世界坐标系(即物体所处真实世界)
内参矩阵
设空间中有一点P,若世界坐标系与相机坐标系重合,则该点在空间中的坐标为(X, Y, Z),其中Z为该点到相…
【KITTI】KITTI数据集简介(二) — 标注数据label_2
Kitti标签存储在data_object_label_2文件夹中,存储为txt文本文件,即data_object_label_2/training/label_2/xxxxxx.txt。标签中仅不含了7481个训练场景的标注数据,而没有测试场景的标注数据。 为了快速进行算法调试、训练、评估和验证&#x…
【KITTI】Kitti数据集 Tr(旋转平移)矩阵求逆
本节详细介绍KITTI从图像坐标系到激光雷达坐标系的变换原理、过程和代码。 Kitti数据集的Tr_velo_to_cam矩阵是将激光雷达点云坐标变换到图像坐标系。Tr是一个3x4的矩阵,直接左乘激光雷达坐标即可得到图像坐标系中的坐标。 Tr可以认为是由旋转矩阵R和平移矩阵T组成&…
【点云前视图FV】详细理解雷达点云前视图(FV, Front View)
本节详细介绍雷达点云前视图(FV, Front View)的基本原理和计算过程,含原理介绍、代码、数据和可视化效果。
1 前视图基本原理 雷达在工作时通常是围绕一个轴进行旋转扫描。对于单线激光雷达来说,旋转扫描数据可以得到…

mmdetection3d kitti (持续更新)
Mmdetection3d集成了大量3D深度学习算法,其中很大一部分可以在智能驾驶KITTI数据集上运行。在算法应用KITTI数据之前,mmdetection3d提供了相应的预处理程序。关于kitti的详细介绍请参考本博客之前的文章,例如:【Mini KITTI】KITTI…

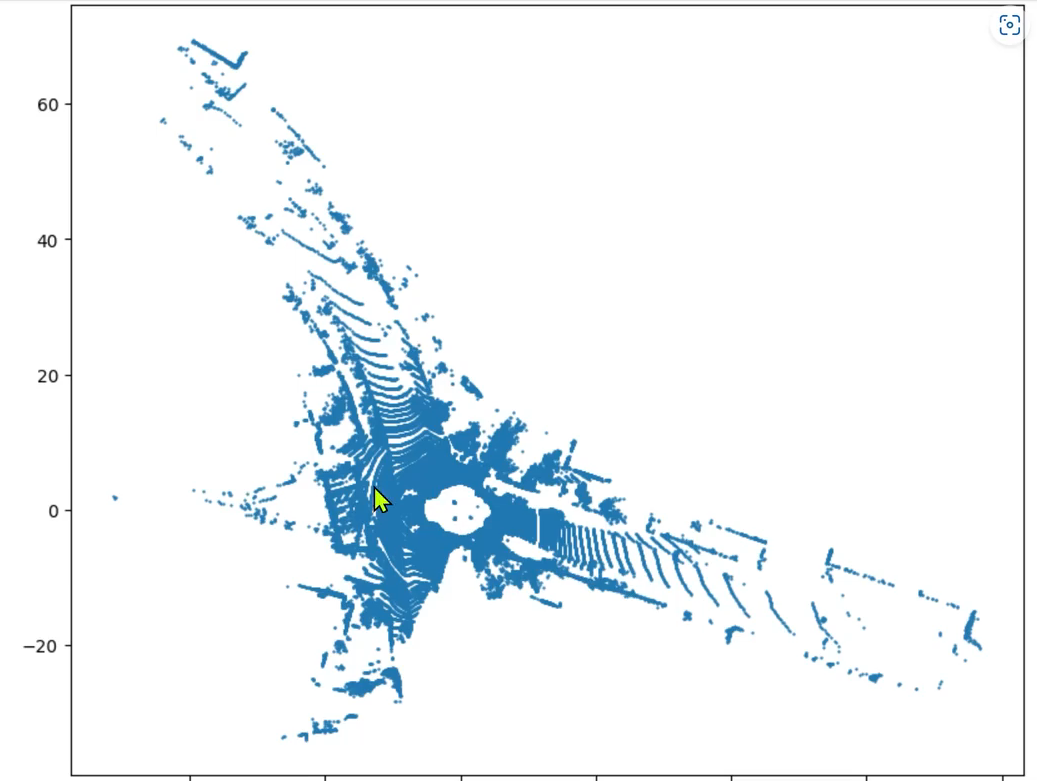
【点云鸟瞰图BEV】点云鸟瞰图BEV原理与可视化
本节将介绍激光雷达等点云的鸟瞰图生成原理、代码及效果图。
1 BEV视图原理 点云BEV(Birds Eye View)视图是指点云在垂直于高度方向的平面上的投影。通常,在获得bev视图前,会将空间分割成体素,利用体素对点云进行下采…

KITTI depth completion數據集評測
KITTI depth completion數據集評測前言數據集評價指標環境編譯修改io_depth.hmin的參數型別函數返回型別編譯並執行ERROR: Couldnt generate/store output statistics!結果image_0depth_origdepth_ipolerrors_imgerrors_outmaermseinverse maeinverse rmselog maelog rmsescale…
【KITTI可视化】kitti三维目标标注可视化
在kitti标注文件label_2中,三维目标标注的结果是包括中心坐标、尺寸和旋转角度等三个部分,其中中心坐标和旋转角度是在相机坐标系下的结果。因此,这两个结果需要利用到标定文件calib变换到雷达坐标系下。 Kitti坐标系如下图所示: …

处理点云数据(六):点云分割
展示了如何在三维激光雷达数据中检测地平面和发现附近的障碍物。
clear;clc;
%%
% for img_idx 181:446
% fid fopen(sprintf(D:/KITTI/data_set/2011_09_26/2011_09_26_drive_0009_sync/velodyne_points/data/%010d.bin,img_idx),rb);
% velo fread(fid,[4 inf],s…
【KITTI】KITTI数据集简介(四) — 标定校准数据calib
KITTI标定校准文件主要作用是把激光雷达坐标系测得的点云坐标转换到相机坐标中去,相关参数存在data object calib中,共包含7481个训练标定文件和7518个测试标定文件。标定文件的存储方式为txt文本文件。 calib训练集存储为data_object_calib/training/ca…
3D目标检测数据集 KITTI(标签格式解析、点云转图像、点云转BEV)
本文介绍在3D目标检测中,理解和使用KITTI 数据集,包括KITTI 的基本情况、下载数据集、标签格式解析、点云转图像、点云转BEV。
目录 1、KITTI数据集中3D框可视化的效果
2、先看个视频,了解KITTI 的基本情况
3、来到KITTI官网,下…
视觉SLAM数据集(三):KITTI 数据集
教程目录 一、官网二、注册登录三、下载数据集四、测试数据集 一、官网 官网地址:https://www.cvlibs.net/datasets/kitti/eval_odometry.php Kitti数据集很庞大,包含了双目、光流、场景流、深度、里程计、目标、跟踪、马路、语义、原始数据等大类别&…

ORB-SLAM3算法2之开源数据集运行ORB-SLAM3生成轨迹并用evo工具评估轨迹
文章目录 0 引言1 数据和真值1.1 TUM1.2 EuRoc1.3 KITTI2 ORB-SLAM3的EuRoc示例3 ORB-SLAM3的TUM-VI示例4 ORB-SLAM3的ROS各版本示例4.1 单目4.2 单目和IMU4.3 双目4.4 双目和IMU4.5 RGB-D0 引言
ORB-SLAM3算法1 已成功编译安装ORB-SLAM3到本地,本篇目的是用TUM、EuRoc和KITT…
基于Rangenet Lib的自动驾驶LiDAR点云语义分割与可视化
这段代码是一个C程序,用于处理来自KITTI数据集的激光雷达(LiDAR)扫描数据。程序主要实现以下功能: 1. **读取和解析命令行参数**:使用Boost库中的program_options模块来定义和解析命令行参数。这包括扫描文件路径、模型…
处理点云数据(三):三维点云可视化
三维可视化点云
使用Mayavi可视化
首先使用anaconda安装mayavi,打开命令行界面
conda install mayavi
如果python版本是py3则会出错,需要安装python2.7版本:
conda create -n py2 python2
然后在py2的环境下安装mayavi:
co…
KITTI数据集转化为ROS bag包(解决各种类型数据集,实测有效)
KITTI数据集转化为ROS bag包(解决各种类型数据集,实测有效)
1.raw data数据集转化 raw data数据集的转化可以参考我之前的博客 将KITTI数据集转化为ROS bag包——kitti2bag使用教程 2.其他数据集转化 除了上面kitti2bag数据集转化工具外&…
ORB-SLAM3算法2之EuRoc、TUM和KITTI开源数据集运行ORB-SLAM3生成轨迹并用evo工具评估轨迹
文章目录 0 引言1 数据和真值1.1 TUM1.2 EuRoc1.3 KITTI2 ORB-SLAM3的EuRoc示例2.1 纯单目的示例2.2 纯单目的轨迹评估2.3 纯双目的示例2.4 纯双目的轨迹评估2.5 单目和IMU的示例2.6 单目和IMU的轨迹评估2.7 双目和IMU的示例2.8 双目和IMU的轨迹评估2.9 前四种的评估结果对比3 …

处理点云数据(一):点云与生成鸟瞰图
点云数据
点云数据一般表示为N行,至少三列的numpy数组。每行对应一个单独的点,所以使用至少3个值的空间位置点(X, Y, Z)来表示。 如果点云数据来自于激光雷达传感器,那么它可能有每个点的附加值,在KITTI数据中就有一个“反射率…
处理点云数据(二):点云与生成前视图
创建点云数据中的前视图
前视图投影
为了将激光雷达传感器的前视图平面化为二维图像,必须将三维空间中的点投影到可以展开的圆柱形表面上,以将其平面化。下面公式见论文Vehicle Detection from 3D Lidar Using Fully Convolutional Network
# h_res …
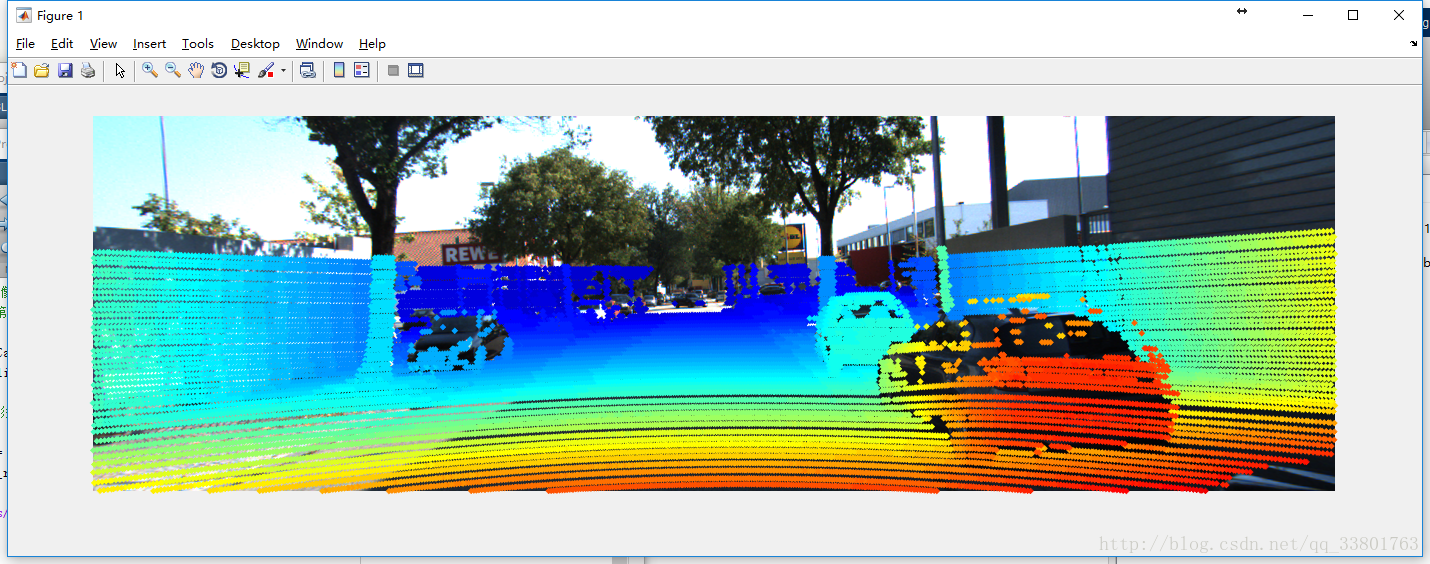
处理点云数据(四):点云到图像平面的投影
点云到图像平面的投影
坐标系的定义
相机(x:右,y:下,z:前) 点云(x:前,y:左,z:上)
读取传感器校准参数
在…